Als wetenschapsantropoloog observeert Massimiliano Simons een aantal robotici in Darmstadt om te achterhalen wat robots ons kunnen vertellen over de mens.
‘Het experiment zal zo’n vijf uur in beslag nemen,’ vertelt Arjang me. Arjang Ahmadi is student aan de TU Darmstadt. Samen met een medestudent is hij volop in de weer om de meetapparatuur gereed te zetten. Overal op mijn lichaam worden passieve sensoren geplaatst, die infraroodlicht weerkaatsen. Een reeks zogenaamde EMG-sensoren worden op mijn rechterbeen aangebracht om de elektrische activiteit van de spierzenuwen te meten.
We zijn om acht uur ’s morgens begonnen, maar het duurt lang voor het experiment echt van start kan gaan. De infraroodcamera’s moeten nog gekalibreerd worden en sensoren op het lichaam aanbrengen is niet zelf-evident, aangezien elk lichaam anders is. Maar wat voor hun frustratie is, is voor mij een goudmijn aan informatie.
Want terwijl zij zich gereed maken om mij te observeren, observeer ik hen. Ik voel me als een van de labmuizen in Douglas Adams' Hitchhiker's Guide to the Galaxy. Het sciencefictionboek verhaalt hoe muizen slechts gewillig onze menselijke experimenten ondergaan omdat het eigenlijk buitenaardse wezens zijn die stiekem het gedrag van wetenschappers bestuderen.
Op gelijkaardige wijze ben ik als wetenschapsantropoloog in Darmstadt om wetenschappers te observeren. Ik wil hedendaagse ‘technowetenschap’ begrijpen. Technowetenschap typeert zich door praktijken die zwaar inzetten op het gebruik van technologie om fenomenen te produceren en te bestuderen. In dit geval gaat het om robots die worden ingezet om menselijke beweging te bestuderen.
Een symbiotisch model
Iedereen kent wel de filmpjes van robots die er niet in slagen ogenschijnlijk eenvoudige handelingen uit te voeren, zoals het openen van een deur. Het is de bekendste vorm van onderzoek naar robots: je bouwt een robot die een deel van het menselijk takenpakket zal overnemen.
Maar in Darmstadt doen ze het anders. Dat vertelt professor André Seyfarth mij, die het Lauflabor leidt waar mijn experiment plaatsvindt. Hoewel professor in de sportwetenschappen, ziet hij zijn onderzoek naar menselijk beweging in het licht van grotere, filosofische vragen over de aard van de mens.
Zijn eigen werk vat hij op als een alternatief model om naar robots te kijken. Terwijl het Amerikaanse model de mens wil vervangen of overtreffen, gaat het in Darmstadt vooral om een symbiotisch model: mens en machine werken samen. Elk onderzoek naar robots heeft als doel ons iets te vertellen over de mens.
Terwijl het Amerikaanse model de mens wil vervangen, gaat het in Darmstadt om een symbiotisch model: mens en machine werken samen
Die keuze staat volgens Seyfarth niet los van institutionele keuzes. Amerikaans onderzoek wordt vaak door het leger gesponsord, terwijl de financiëring in Duitsland komt van de Deutsche Forschungsgemeinschaft (DFG). Het is niet toevallig dat ze in de Verenigde Staten robots vooral zien als supermensen. In het Duitse systeem is er volgens Seyfarth meer plaats voor fundamenteel onderzoek.
Wat we met robots willen doen is dus geen uitgemaakte zaak. Het is afhankelijk van een maatschappelijke keuzes over wat voor soort onderzoek we willen ondersteunen en waar we geld in willen steken.
Mensen pesten
Op het eerste gezicht komen de meeste experimenten in het Lauflabor over als geniepige manieren om mensen te pesten. Testsubjecten moeten bijvoorbeeld op een verhoogd platform wandelen waarop dat platform dan onverwachts van hoogte verandert. Vervolgens bestuderen de onderzoekers hoe het testsubject er alles aan doet om niet te vallen.
Een gelijkaardig project, in samenwerking met Nederlandse collega’s, laat het testsubject een ‘rugzak’ aandoen. Ook hier kan de rugzak tijdens het wandelen de persoon onverwachts naar links of rechts duwen.

Maar al deze experimenten vertrekken van de bovenstaande filosofie: het gaat om een studie van de menselijke beweging om betere robots te maken, maar robots die op hun beurt in dienst gaan staan van het menselijk lichaam.
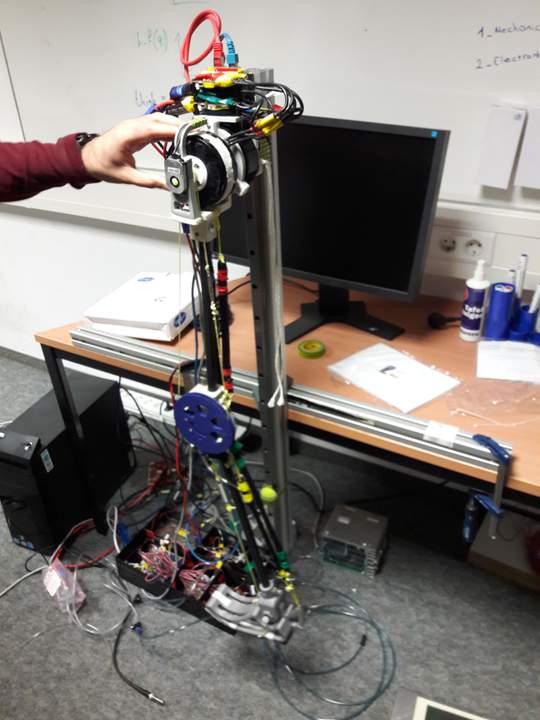
Het experiment waar ik aan deelneem is een stap in die richting. Ik moet op een loopband lopen, zowel zonder als met een ‘exoskelet’: een draagbaar pak rond mijn benen die het lopen makkelijker moet maken. Wat ik draag is een passief exoskelet, want het heeft geen motor zoals bij een actief exoskelet. Het werkt daarentegen met een reeks veren en hefbomen die het lopen ondersteunen.
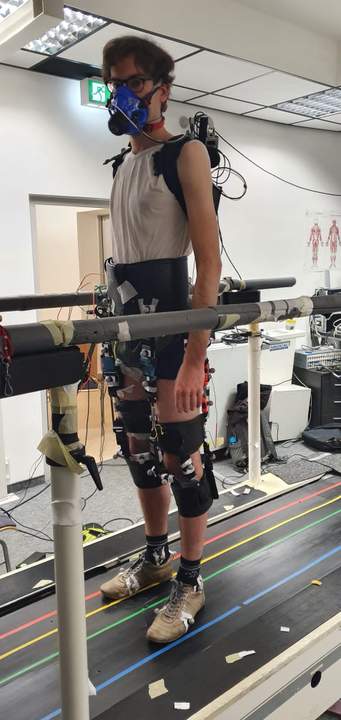
Het doel is te kijken in welke vorm zo’n exoskelet een efficiëntiewinst oplevert in de vorm van een verlaagd spier- en energieverbruik. Vandaar de nood aan al de sensoren en camera’s, die zorgvuldig bijhouden hoe mijn loop verandert in de verschillende variaties van het experiment.
Robot als spiegel
Op het eerste gezicht lijkt het doel betere robotprotheses, maar de realiteit is ingewikkelder. Technowetenschappers maken typisch geen echt onderscheid tussen praktische en theoretische doelen. Ja, ze willen hier bruikbare protheses maken, maar tegelijkertijd zetten ze robots in voor een betere kennis over de menselijke beweging.
Maar waarom moet die studie van menselijke beweging dan via robots gaan? Waarom is het bestuderen van menselijke lichamen niet genoeg? Als ik hen die vraag voorleg, komen er verschillende antwoorden.
Technowetenschappers maken geen echt onderscheid tussen praktische en theoretische doelen
Allereerst is er de eenvoud: een menselijk lichaam is complex. Laat een mens lopen en je krijgt alles in een keer op je bord. Vervang die mens door een eenvoudige robot en je hebt een bevattelijk model, met maar enkele gewrichten en spieren waarmee je rekening moet houden.
Daarnaast zijn robots makkelijker te manipuleren. Voor een experiment kan je niet zomaar in een menselijk lichaam een spier wegsnijden, zowel omwille van praktische als ethische bezwaren. Bij robots kan dat wel.
Seyfarth zelf geeft nog twee redenen. Voor hem is een robot ook een rechter. Je theoretisch model kan mooi in elkaar steken, maar de robot geeft het model de ultieme test: werkt het ook in de werkelijkheid? Daarnaast ziet hij robots ook als spiegels: ze tonen wat we begrijpen van menselijke beweging. Als we het niet kunnen nabouwen, dan begrijpen we het nog niet.
Zagende robots
Een aantal van de experimenten in het Lauflabor focussen ook op de interactie tussen mens en machine. Seyfarth geeft het voorbeeld van twee robots die samen moet zagen. Mensen slagen er heel makkelijk in zo’n handeling goed op elkaar af te stemmen. Maar hoe doen ze dat?
Die vraag wordt des te relevanter in een toekomst waar samenwerking met robots de regel wordt. Wat als je collega op de werf een robot is? Maar hetzelfde geldt eigenlijk voor de exoskeletten. Ook dat is fundamenteel een samenwerking tussen mens en machine.
Elke sociale coördinatie vooronderstelt een vertrouwensband. Dat geldt ook voor het exoskelet: wanneer vertrouwen mensen hun exoskelet genoeg om erop te steunen?
Dat roept niet enkel technische, maar ook sociale vraagstukken op. Seyfarth geeft een eenvoudig voorbeeld: stel iemand wil je koffers helpen dragen. Wanneer vertrouw je die persoon? Elke sociale coördinatie vooronderstelt een vertrouwensband. Dat geldt ook voor het exoskelet: wanneer vertrouwen mensen hun exoskelet genoeg om erop te steunen? Wanneer vertrouwen mensen hun eigen lichaam?
Experimenteren met robots is in die zin experimenteren met onze maatschappelijke toekomst: hoe zullen we met robots omgaan, eens zij massaal in ons straatbeeld aanwezig zullen zijn? Die toekomst ligt nog niet vast, maar hangt af van onze keuzes. Doorheen beleidsoverwegingen en onderzoeksfinanciëring stelt zich dus steeds de vraag: welke toekomst met robots willen we eigenlijk?



